| ��ѹ������Χ |
35 kV��110 kV��220 kV |
| �Ƶ�� |
50Hz |
| ������Դ |
DC24V |
| �����¶� |
-35�桫60�� |
| ���ʪ�� |
��ƽ��<95%����ƽ��<90% |
| ���γߴ�(mm) ���� |
������ 165��120��68 | |
�����������2��
��2
| ��ѹ�ȼ� |
Ԥ�豨������ |
| 35kV |
3m |
| 110kV |
4.5m |
| 220kV |
5m | |
5.������
�����ͼ����
ͼ�� ���ͼ
��1����λѡ���л���ͬ��ѹ�ȼ����ڵ�ѹδ֪��ʱ��ʹ�á�35kV����λ��
��2�����أ���Դ���أ�
��3��ָʾ�ƣ�
�� ϵͳ���У���������ָʾ���й��ɵ���˸��
�� ���������ϣ���δ�Ӵ����������ߴ������Ӵ����á���·�Ͷ�·������£������������ϡ�ָʾ������ͬʱ�����������ָʾ������������Ԫ���ⱨ����
�� �����������δ�Ӵ����������ߴ������Ӵ����á���·�Ͷ�·������£����߸߿���ҵ����������ӽ�������·��ȫ����ʱ�������������ϡ�ָʾ������ͬʱ�����������ָʾ������������Ԫ���ⱨ����
�� ϵͳ�������߿���ҵ����������ӽ�������·��ȫ����ʱ�����������������ָʾ������ͬʱ��ϵͳ������ָʾ������������Ԫ���ⱨ����
6.���ܽ���
��1����������
ϵͳ������Χ�㣬ͨ�������ڲ�ͬ��ѹ�ȼ�֮���л���
��2������ָʾ����������
�������ϲɼ����Դ�������Ӧ��·�ϵ��źţ������źŴ��ڱ�����ֵʱ�������������ָʾ���������������죬��ϵͳ������ָʾ������������Ԫ���ⱨ����
7.����ԭ��
����ԭ����ͼ�ߡ�
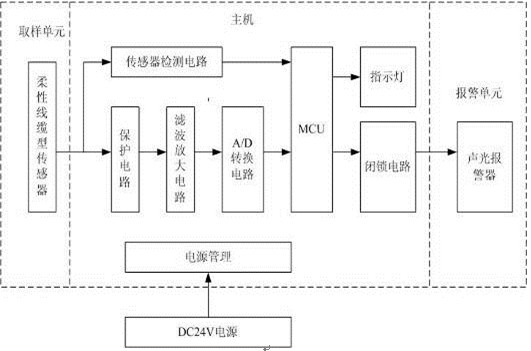
ͼ�� ����ԭ��ͼ
SHGJ-I�߿���ҵ���籨��װ�������������Դ��������������շ�װ�úͱ�����Ԫ��������ɡ���ѹ��������Χ�Ĵų��źų�ָ��˥���ֲ������Դ�������װ��Z���Ӵ�����ѹ�ߵ�λ�ã��ڸ߿���ҵ�����������У����Դ�����������ʵʱ�����Χ�Ĵų��źţ���Ӧ����ѹ�źţ����˲����Ŵ�������A/Dת�������MCU��������źŴ��ڱ�����ֵ�� MCU����������źš�
8.����˵��
��1������KK�ӵء�
��2�����������ϵĻ��������л���ͬ��ѹ�ȼ�����ѹ�ȼ�δ֪��ѡ��35kV����λ��
��3�����������ڸ߿���ҵ���ļ�ʻ���У�ͨ���ӵ���KK�ӵء�
��4����ͨ��Դ(DC24V)����Դ���ء������ϵ����������һ��������ָʾ���й��ɵ���˸��������������������������ʼ�ɼ������źš������������������������������źŲɼ���ɡ�
��5���������ϲɼ����Դ������ϵĸ�Ӧ�źţ�����Ӧ�źŴ��ڱ�����ֵʱ�����������죬�����������ָʾ��������ϵͳ������ָʾ������������Ԫ���ⱨ������ʱ��������ԱӦ������ֹͣ�����ƶ���
9.ָʾ���ź�˵��
��� |
�����ź� |
������� |
1 |
�����������ָʾ���� |
�����������ϡ� ָʾ���� |
- δ�Ӵ�������
- �������Ӵ�������
- ��������·��
�������������Ӧ�öϵ��顣 |
2 |
��ϵͳ������ ָʾ���� |
�������۽ӽ���ѹ�����豸��Ӧ��ʱֹͣ�����ƶ��������õ��۷������ƶ��� |
3 |
����ָʾ����˸�� |
����ϵͳ�������С� |
4 |
����ָʾ�Ʋ���˸�� |
����ϵͳ���в������� |
5 |
ϵͳ�ϵ����������һ���� |
����ϵͳ�Ѿ��ϵ����С� |
6 |
ϵͳ�ϵ���������������� |
����ϵͳ��ɲɼ������źŹ����� |








